Shield controlador de motor L293D
| Actualizado:
Comentarios: 0

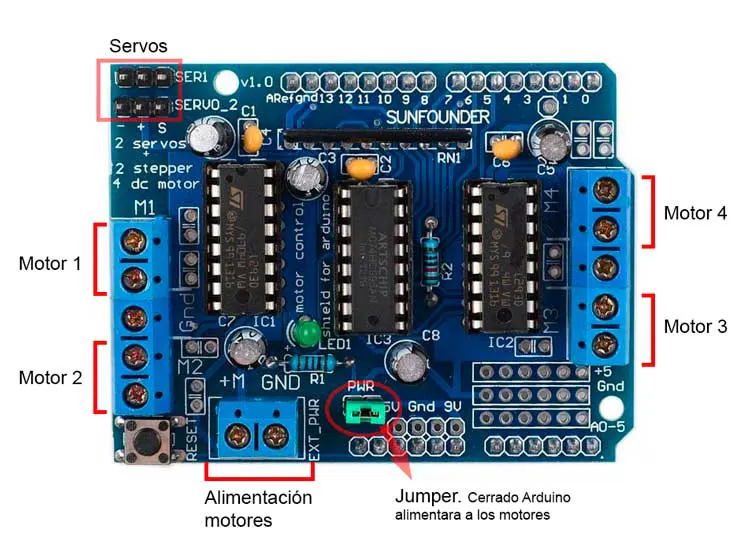
El circuito integrado L293D es un controlador de motores, que tiene la capacidad de controlar hasta cuatro motores de corriente continua, sevomotores o motores paso a paso. Utiliza la mayoría de las ranuras de Arduino, solamente nos deja libres los pines analógicos del 0 al 5 y el pin digital 2. De los digitales tampoco utiliza la salida 0, 1 y 13, pero no deja agregar terminales.
Qué es lo que nos permite hacer esta placa:
- Conectar 4 motores de corriente continua de entre 4.5 a 25V. Nos permite controlar cada motor independientemente, tanto su velocidad como el sentido de giro.
- Conectar 2 motores paso a paso tanto bipolares como unipolares.
- Conectar 2 servos de 5V, la alimentación es suministrada directamente por la placa Arduino.
Para la alimentación de los motores tenemos dos opciones; con el jumper cerrado nos llegará directamente la tensión que se aplique en el sac de arduino, o bien podremos utilizar el conector externo de la placa quitando el jumper.
Especificaciones:
- Alimentación externa entre 4.5 a 25 VCD
- Control de velocidad de motores DC con resolución de 8 bits
- Control de motores paso a paso con 1 y 2 bobinas en modo sencillo, doble (mayor torque), intercalado (medio paso) y micro pasos 2 conectores independientes para controlar 2 servos pequeños de 5 V (Pines digitales 9 y 10)
- Protección contra sobre carga térmica
- Diodos de protección contra voltajes inversos generados por las cargas inductivas
- Corriente máxima continua en cada una de las salidas M1, M2, M3 y M4: 600 mA (0.6 A)
- Corriente máxima pico no repetitivo en cada una de las salidas M1, M2, M3 y M4: 1.2 A
- Resistores de pull-down que mantienen los motores deshabilitados durante el encendido
- Requiere fuente externa para la alimentación de las cargas en las salidas M1, M2, M3 y M4
- Botón de reset para la placa Arduino
Esta placa la hemos utilizado en el Octavo Bit para realizar un coche controlado por bluetooth con cuatro motores de corriente continua.