¿Cómo utilizar un joystick analógico con Arduino?
| Actualizado:
Comentarios: 0
En este post veremos la conexión de un joystick a la placa Arduino. Primero se comprobara hacia donde se mueve sacando los datos por el serial monitor y en un segundo proyecto, según el movimiento del joystick encenderá un led.
En este artículo conectaremos de una forma sencilla un joystic analógico a la placa de Arduino Uno. El joystick es similar a dos potenciómetros conectados entre sí; uno, para el eje X (Horizontal) y otro, para el eje Y (Vertical). Y cuenta con un switch de selección.
Material necesario:
- Arduino Uno
- Cables macho-hembra
- Joystic analógico.
En la siguiente imagen se muestra el circuito de la conexión con la placa de Arduino:
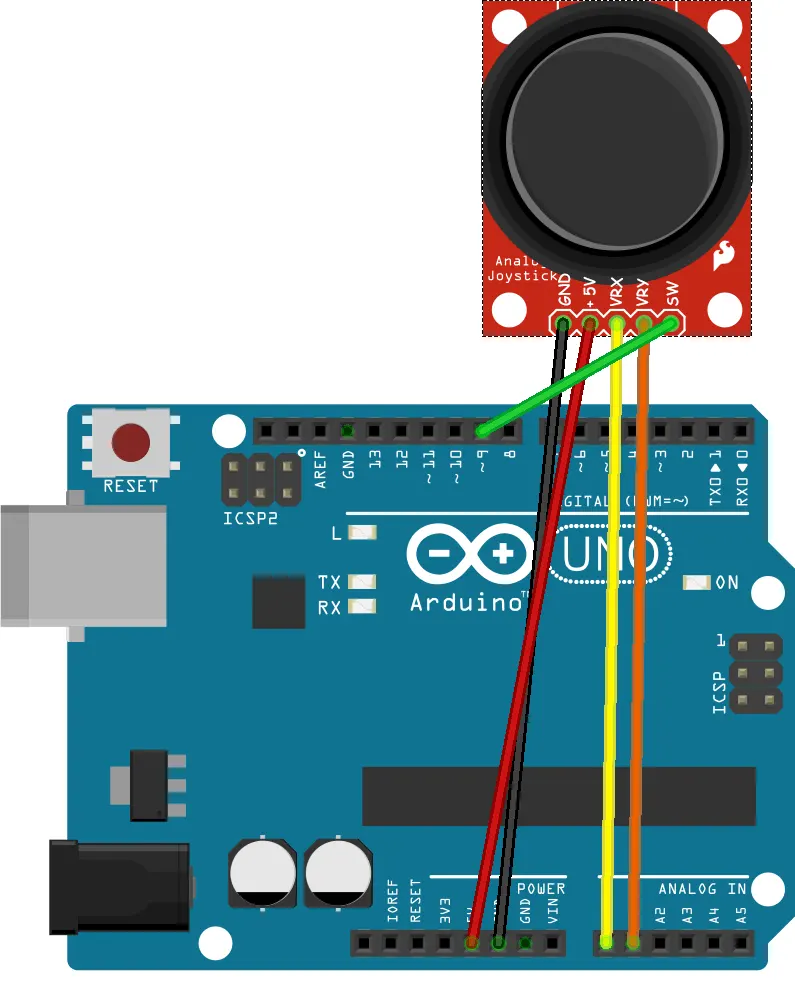
Se debe tener en cuenta que la placa de Arduino usa un ATmega328 como microcontrolador, con una resolución ADC de 10 bits. Quiere decir que los valores en cada canal analógico pueden variar de 0 a 1023. Con estos datos sabemos que la posición inical del joystick es (x, y) = (511, 511). En el eje X los valores podrán variar de 0 a 1023, al igual que en el eje Y.
const int pinX = A0;
const int pinY = A1;
const int pinBoton = 9;
void setup() {
pinMode(pinBoton , INPUT_PULLUP); //activar resistencia pull up
Serial.begin(9600);
}
void loop() {
int X = 0;
int Y = 0;
bool botonValor = false;
//leer valores
X = analogRead(pinX);
/*Es necesario hacer una pequeña pausa entre lecturas de diferentes
pines analógicos porque si no puede ser que obtengamos la misma
lectura dos veces (debido al funcionamiento interno de esos pines) */
delay(100);
Y = analogRead(pinY);
botonValor = digitalRead(pinBoton);
//mostrar valores por pantalla
Serial.print("X:" );
Serial.print(X);
Serial.print(" | Y: ");
Serial.print(Y);
Serial.print(" | Pulsador: ");
Serial.println(botonValor);
delay(1000);
}Encender un led según el movimento del joystick.
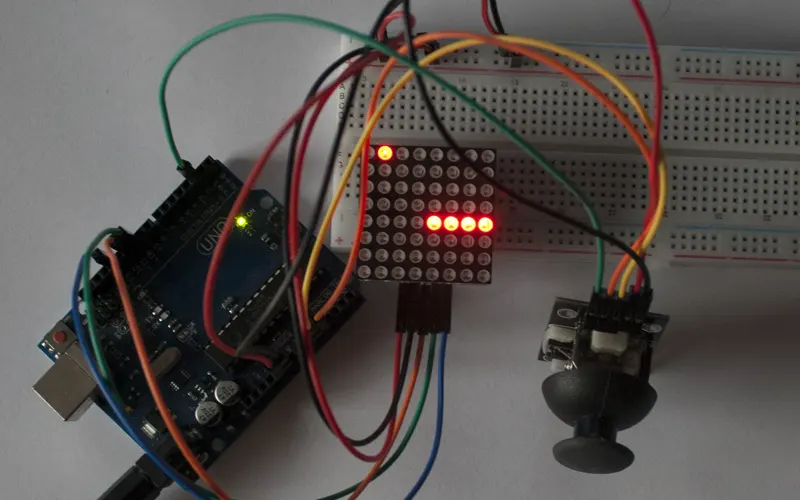
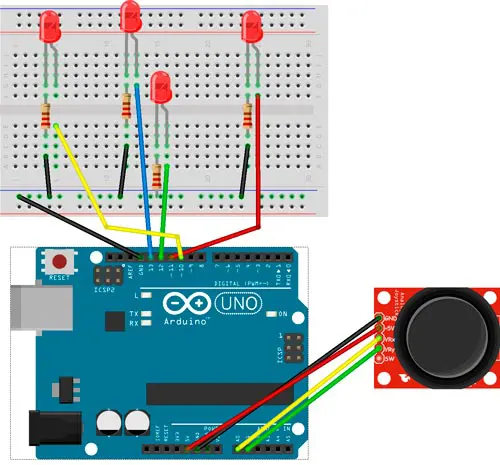
En la siguiente prueba utilizaremos el joystick para encender unos led colocados en 4 direcciones (superior, inferior, izquierda y derecha).
Material necesario:
- Arduino Uno
- Protoboard.
- Cables macho-hembra
- Joystic analógico.
- 4 leds.
- 4 resistencias de 220 Ω.
Código:
int ladoy = A1; // Entrada de referencia para el eje de las Y.
int ladox = A0; // Entrada de referencia para el eje de las X.
int ledup = 12; // Led superior.
int ledD = 13; // Led inferior.
int ledL = 10; // Led izquierda.
int ledR = 11; // Led derecha.
int valorX;
int valorY;
void setup() {
Serial.begin(9600);
/* Declaración de los leds
como salidas */
pinMode(ledup, OUTPUT);
pinMode(ledD, OUTPUT);
pinMode(ledL, OUTPUT);
pinMode(ledR, OUTPUT);
}
void loop() {
valorX = analogRead(ladox);
if (valorX > 700){ // derecha
digitalWrite(ledR,HIGH);
Serial.print("x = ");
Serial.println(valorX);
}else{
digitalWrite(ledR, LOW );
}
valorX = analogRead(ladox);
if (valorX < 400){ // izquierda
digitalWrite(ledL,HIGH);
Serial.print("x = ");
Serial.println(valorX);
}else{
digitalWrite(ledL, LOW );
}
valorY = analogRead(ladoy);
if (valorY > 700){ // arriba
digitalWrite(ledup,HIGH);
Serial.print("y = ");
Serial.println(valorY);
}else{
digitalWrite(ledup, LOW );
}
valorY = analogRead(ladoy);
if (valorY < 400){ // abajo
digitalWrite(ledD,HIGH);
Serial.print("y = ");
Serial.println(valorY);
}else{
digitalWrite(ledD, LOW );
}
}Si habéis repasado el código veréis que en la función setup() se han declarado los pines como salida y la función loop lo único que hace es comprobar hacia que dirección se mueve el joystick. La posición inicial es (511, 511), es la equivalente a (0, 0). Para asegurarnos que apunta hacia la derecha vamos a comprobar que x es mayor que 700; para la izquierda, x es menor de 400; hacia arriba, y es mayor que 700; y por último, para abajo, y es menor que 400.
Os animo a hacer fácilmente el siguiente ejercicio para poner a prueba vuestras habilidades: conseguir que se enciendan los 4 leds presionando el botón del joystick.